本文总结在最后一段,文中 CoreXY 亦可为 CoreXZ、CoreYZ 等。
最近打算以低成本、结构简洁有效、组件标准易于拆装替换为目标设计一台3D打印机,各种方案思索再三,决定使用轮带传动的设计,然后就 CoreXY 和 H-bot 等设计方案上网胡搜一通,这里记录一下各自利弊。
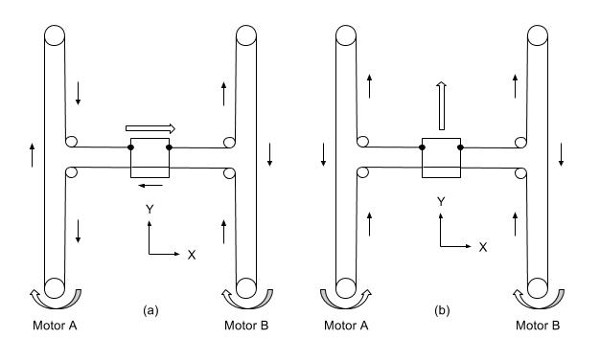
事实上 CoreXY 和 H-bot 是两种在原理上相似的方案,无论选择哪种方案固件配置方式都是完全相同的。原理图如下。
H-bot
CoreXY
如果你初看两种方案的同步带布局,一定会选择同步带布局简单明了的 H-bot 方案——确实,这就是 H-bot 方案的优势所在,美观高效还省钱。而 CoreXY 方案引入了过长的同步带,会对系统精度产生不利的影响,而且设计复杂。
但是大量的爱好者使用的是 CoreXY 方案,整理总结 CoreXY 方案的支持者的留言,他们的理由是 H-bot 方案会产生扭矩,对结构刚度要求极高。
以下为我的理解:
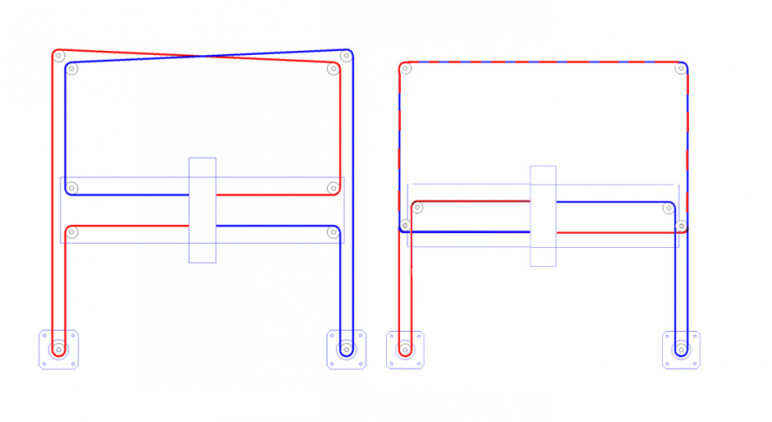
提取两种方案四角同步带轮中心点,连线构成一矩形,可认为其为固定框架。当主动轮转动时,同步带会拉动同步带轮,使框架产生由矩形变成菱形的趋势。
情况 (a) 中,H-bot 的两主动轮通过同一同步带传力于滑块的右端连接点,突然的转动 (甚至反向转动) 会使 H-bot 的框架有左倾的趋势,而 CoreXY 的两同步带都传力于滑块左端连接处,因为蓝色同步带绕架半圈,使得两主动轮因同步带而产生的扭矩刚好反向,即使 CoreXY 方案的框架产生 H 变 A 的趋势。对于框架而言,拉压力真算不得什么。
同理,情况 (b) 中,H-bot 的滑杆上两从动同步轮受力,CoreXY 同理,都是产生变 A 的趋势。
如此,CoreXY 方案的优势,尤其是对于3D打印这种滑块频繁往复运动的类型设计优势就显而易见了。
正如 reddit 上一位老哥所说的:
The sad is real when the gantry starts waving at you.
笑得我肚子疼
总结:在普通连接组成框架时,优先考虑 CoreXY 方案;当框架刚度极大 (譬如焊接、整体切割时) 时,优先考虑 H-bot 方案。
2019年1月16日
图片来自网络,侵删